您的当前位置: 中国锻压网 > 资讯中心 > 正文
您的当前位置: 中国锻压网 > 资讯中心 > 正文|
无论是德国率先提出的“工业4.0”概念,美国推行的“先进制造伙伴关系”计划,还是日本正在实施的“智慧制造系统”和中国工信部通过的“中国制造2025规划”,这些都指向同一个目标,那就是希望通过先进的IT与自动化技术来促进制造业的革新,以实现“智能化”,提升效率,降低成本。而要实现这个目标工业机器人是不可或缺的一环。 以前,工业机器人应用最为广泛的是汽车制造业;现在,工业机器人制造企业正努力向其他领域拓展。工业机器人制造企业也如雨后春笋般不断涌现,据统计仅去年中国国内差不多增加了200多加工业机器人制造厂商。对于工业机器人的市场前景,业界都是一致看好,普遍认为未来5~10年将会迎来工业机器人的一个爆发期。不过,要想在这一波浪潮中得益的话也并不容易。因为工业机器人涉及的系统相当复杂,仅核心零部件就包括了机械系统、控制器、伺服器和减速器等等。本刊就工业机器人的关键技术问题采访了一些半导体厂商,详细介绍了工业机器人当中的一些电子核心零部件。 控制器平台之争 在Altera公司亚太区工业业务部市场开发首席经理江允贵看来,有三个趋势在推动着工业自动化市场的蓬勃发展。 一是,提升能源效率,降低能源成本; 二是提升生产效率,这包括功能安全、生产线的稳定安全、保护操作人员的安全、以及机器损坏的降低和更长的生命周期和可靠度; 三是所谓的智能工厂。而只有前面两个因素达到后,才有可能实现智能工厂。他认为工业机器人是自动化里的很关键一部分。 江允贵拿智能工厂举例,他说现在一个典型的的智能工厂,从企业到工厂,以及工厂内如都是以工业以太网相连接的,他认为用工业以太网取代传统的以太网,主要是因为工业以太网的实时性更好。工业以太网可以连接主站和从站,连接主站中的PLC、PAC/运动控制器和HMI,和从站中的伺服器、I/O模块等等。 他进一步指出,其实工业机器人就是由这些关键零组件组合而成。由这些主站和从站可以组合成一个工业机器人,也可以做成一个CNC,CNC也是工厂自动化的一个关键。 虽然工业机器人可以看成是由上面的零组件组合而成,但具体到工业机器人里面的话也会有所不同。工业机器人的主要结构有机器人的控制器和伺服器。目前来说工业机器人有两轴、3轴的、最高也有7轴的。不过常用的是3~6轴的SCARA或Delta机械手臂。 由于中国是生产制造大国,由于缺工,智能手机和汽车制造商的需求,工业机器人市场增长非常迅速。江允贵表示,对于工业机器人的主控平台来说,一般都是以基于PC的X86的工控机为主,特别是在欧美工业机器人市场。一般在这样的X86平台上,FPGA是作为辅助存在的,主要充当加速的功能。在一个X86工控机主控平台上经常会出现多张PCI-E或PCI卡来实现多轴控制功能。不过这样的主控平台一般用于比较高端的工业机器人当中,因为它性能高,成本也高。 还有一种主控平台是用多核心的高端DSP为核心设计的,不过不是很常见的。 另外还有嵌入式主控平台。江允贵表示,目前Altera正在关注这部分的市场。他们希望可以使用单芯片就能实现工业机器人的控制,而不需要昂贵的X86平台再加上FPGA来做机器人的控制。 工业机器人的种类比较多,其最主要的功能有焊接、搬运、摆放、切割和喷漆等等。按照应用场景的不同,机器人的设计要求也会不一样,比如有的需要高速手臂、有的需要慢速、有的需要扭力大、有的需要很高的精密度等等不一而足。 “近期Altera就利用单颗SoC芯片制作出了一个快速、摆放型工业机器人参考设计方案。”江允贵这样对本刊记者表示。该工业机器人的主站控制平台由基于Cyclone V SoC的开发板实现。可以应用在生产线上,包括螺丝的摆放,饮食业中食品(方便面,糖果等)的摆放。对摆放型工业机器人来说,速度和精确度是最重要的参考指标,因为只有这样才能提高生产效率。“为达到高速和高精确度的指标,我们在这个参考设计中采用了目前最受欢迎的EtherCAT工业以太网。EtherCAT属于以太网,但经过我们改良物理层后,可以达到更好的实时性。”江允贵表示。 为了证明这个工业机器人的性能,他通过视频展示了该摆放型工业机器人在下跳棋、巡边和画圆周等运动方式。他认为这三个运动方式可以很明显地看出机器人的效能。
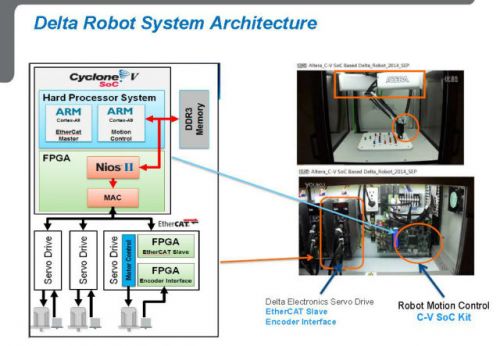
目前市场上还比较少见使用单芯片来实现工业机器人的主站控制。从图2中的系统架构图中可以看到,在主芯片的Cyclone V SoC中,双核Cortex A9 ARM有一个核用作运动控制,另一个核用来做EtherCAT主站。双核各自负责自己的功能,运动控制功能主要负责机器人3只手臂的协调工作,算法都放在ARM中。FPGA主要用来做Nios软核功能。通过FPGA中的MAC出去以后,连接了3个伺服驱动器。据江允贵透露,参考设计中的伺服驱动来自台达。每个伺服驱动里面都有一个FPGA用来做EtherCAT接口。目前伺服驱动里的算法还是通过DSP来实现的。 |
 |
中国锻压网官方微信:扫一扫,立即关注!
关注"中国锻压网",获取独家行业新闻资讯。 添加方法1: 在“添加好友”中直接添加微信账号:chinaforge 添加方法2: 微信中扫描左侧的二维码 |